The main reason we did well last year was that we had our robot done before deadline. At the start of Week Five you have 14 build sessions left, assuming you don't work on Sundays. Our goal is to have everything mechanical done and running at the end of this week, allowing us a full week plus a couple of days to trouble shoot and to coordinate the rather different tasks of Hardware and Software. Will we pull it off?
It is going to be a tough slog. Probably one or more critical systems will fail under real world testing. We had this happen last year with a plastic gear being ground apart in the middle of Week Five. In a sense we had it happen again already this year when our hugely over engineered lift winch let us down. Or more properly, did not pick us up. Hopefully it is just a damaged bearing. Otherwise the detailed calculations of two smart mechanical engineers will be proven Wrong!
So, on we go. Time to fine tune and finish everything on our Practice Machine while doing best quality artistic level work on our Competition Machine. In theory all components can simply be slid from one to the other at the proper moment.....
Monday
No real progress on the winch but a new coupling ordered and should be here Wednesday.

The dubious winch motor now is marked as such. Although the exact diagnosis remains unclear. Excess friction should have caused an increased current draw and some combination of hot wires and/or blown fuse. But when free running it seems healthy. We have some dark suspicions....

A surprising breakthrough by the ball launcher team. This thing actually does fire those whiffle balls quite well, bouncing them off the ten foot ceiling. If it can be fed and controlled it might really work. A fun side line for them to play with whether it turns out or not. Tip for other new teams building this sort of thing. Use old, worn wheels. New ones need to be broken in to get roughed up and give better traction. A side note. Our temporary shortage of 80/20 fasteners is explained by this elaborate test frame!
Tuesday
The ball launcher is now cut down to a managable size and is reliably putting it up to the required height. If we can work out a decent feeder system it might actually be a worth while component.
Here are two new things from the night.
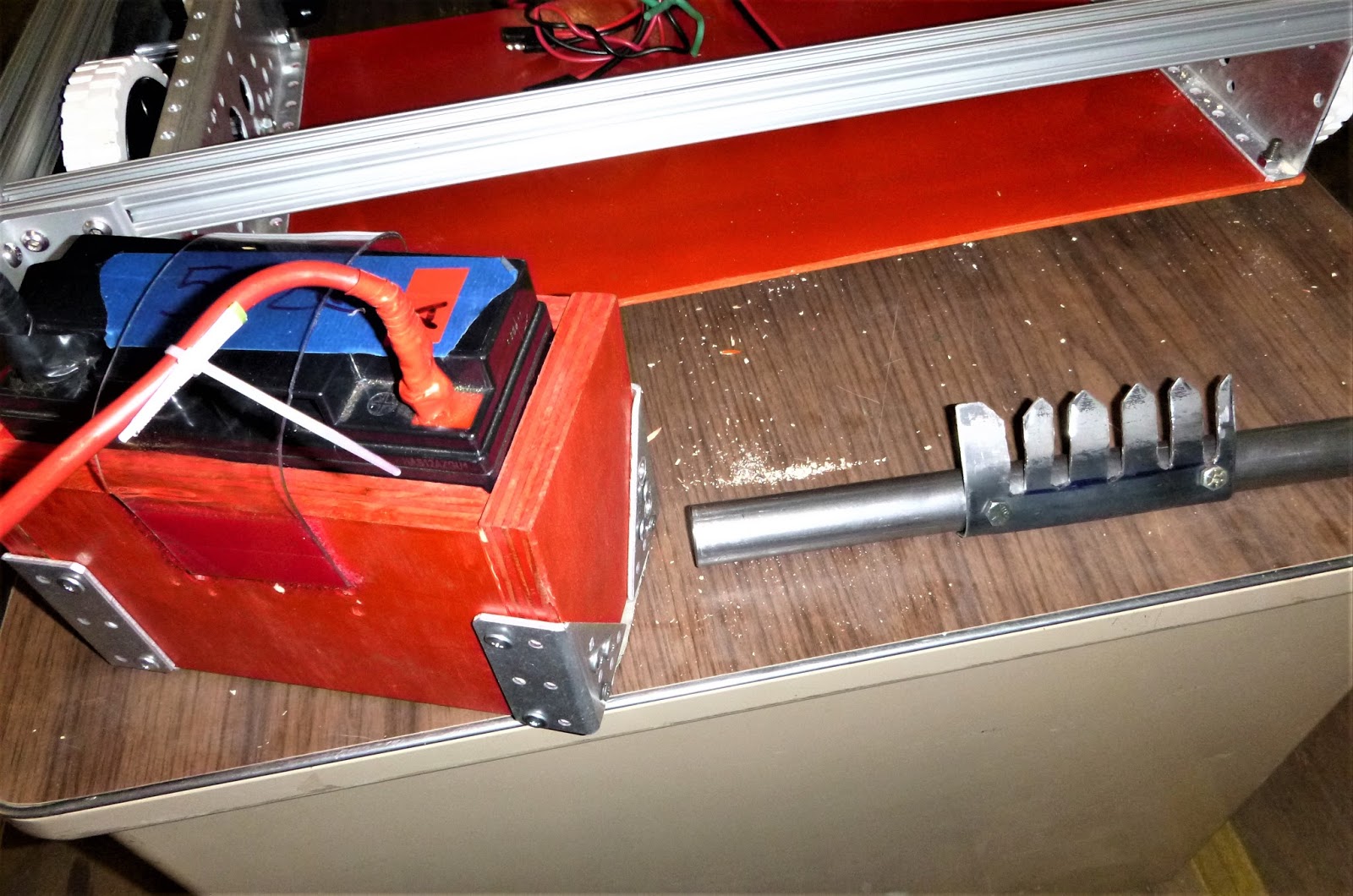
On the left is our battery box. It has to be sturdy, compact and accessable. The holding strap across the top is a strip of polycarbonate. It is held on with bright red Velcro. A nice bit of work. On the right is a sinister looking object. This is version 3.0 of our rope grabber. It seems the previous multi tined version had a tendency to spool up the rope so that we were in effect winding a 4 or 5 inch shaft from our 1 and 1/8 starting point. This single "comb" wraps it much tighter. It takes nine revolutions to reach the desired height versus 4.5. That should in theory double the torque. This plus an improved motor coupling "should" solve our problem by Thursday. We also switched from "some rope I had in my garage" to a thin but strong paracord in our team colors. That got us up to about 10 rotations to climb and with a rating of 550 pounds per strand I think our 120 pound robot should be safely dangling.
Tuesday was a good night of work. One of our best all season. And Week 5 is usually when the team "hits the wall" and does less well.
Wednesday
As is often the case after a great session, an off one. More screwing around, less creative thought. We actually set up a real target ( 8 feet 1 inch ) for the high ball shooter and find that it is spraying the balls about rather randomly.
We did make a bit of progress on other fronts. I rather like this 3D printed servo mount. This servo is a big boy, one of two that keeps "gates" in place so we don't drop the gear when we get jostled in transit. Like most everything else we build it is seriously over engineered. Probably has twice as much plastic in it than what it actually needs.

No comments:
Post a Comment