Wisconsin has a "Tavern Culture". There's good and bad to this of course. Some people get themselves in trouble with alcohol, and when we made the move from a shoe leather and horseshoes based transportation system you had the horrible issue of drunk drivers. But those problems aside, its like the Pub Culture of England. Its nice to have a local establishment where you can go, have a glass of beer, maybe something to eat, maybe watch a ball game.
Oddly, it is difficult to put taverns into their rightful place in local history. They were on the fringe of respectability in the era of the Temperance Movement, and were mostly an all male domain. The writers of newspaper columns and official histories darn well knew all the watering holes in town and had a plenty of stories, but its not as if they were going to put them down on paper for the whole world - their wives included - to see!
So as I try to bring the early days of Taverns in Chippewa Falls into focus I can say at the onset that this will be nothing more than a series of glimpses. All historians are travelers from afar. Not in distance but in time. So think of me as a visitor strolling down the streets of a frontier community, peering into the windows of some fascinating buildings while trying to figure out what goes on in there!
Part One of this study has to begin in French Town. In terms of anything other than a "company town" this was the original community here. It is, or was, on the south side of the river. As its name suggests this was an early French Canadian settlement, or more properly, French Canadian guys and their mostly Native American wives. Nobody seems to know when it got started, and indeed, there have been fur trappers and such coming here since the 1700's.
But just about the earliest name and date I can put to the place happens to be part of our tipsy tale.
----------------------------------------------------------------------------------------------------------------------
Peter Rosseau was born in Canada in 1815. He is said to have been in this part of the world early enough to help build the first mill in 1832. The account suggests this was down stream a ways, but it's likely he was living in French Town in the 1830's, with the first sawmill here being built in 1837. At what point does a house with a friendly owner, who'd put you up for the night and offer you a drink become a tavern/hotel? The "Rosseau House" was certainly present in some form in the early 1850's, and I'd not rule out an earlier date.
Just about the first documentation I could find was an offhand reference to a rather unsavory murder. A man named Wylie had a jealous streak. When his wife walked by a saloon in French Town in 1857, something impolite was said. The next day the man who had offended her was found with his head bashed in. This sort of thing happened every few years in the French Town of the pre-Civil War era. Wylie by the way was not charged, but decided it was prudent to skip town for parts unknown soon after this incident.
Another 1850's reference to French Town and Rosseau comes from a man who remembered the place when he came to the area in 1854. "Peter Rosseau kept a boarding house there. Rosseau was the king there and owned everything around."
The Rosseau House went for a bit of respectability later on. An 1869 mention in the Chippewa Falls Democrat: "Peter Rosseau's well known hotel in French Town is now in full running order and ready to accommodate guests. Bar and stable in connection with the house".
Curiously, this also appeared in 1869:
It's hard to make much of this. Baumgarth was a dealer in Wines, Liquors, Cigars and Groceries over on the "respectable" side of the river. He was also County Treasurer. Mondelert must be a mis spelling of Mandelert, a common enough name in these parts to be a dead end.
I don't have any information on the origin of this photo, so all I can say is that some claim it is a picture of the Rosseau House. Date unclear.
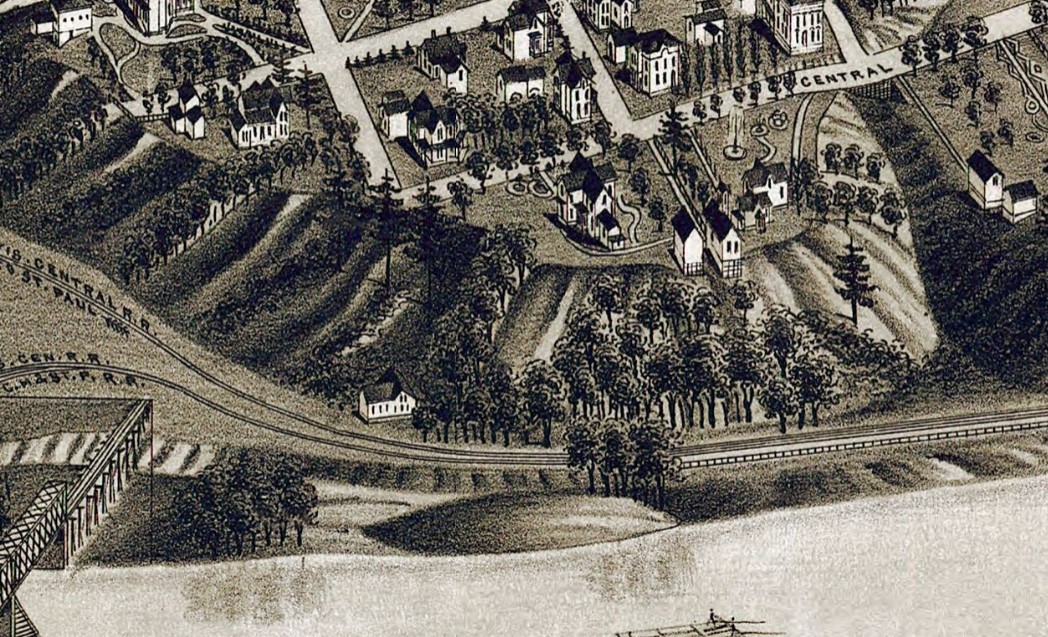
I've been a bit skeptical of this one in the past, but seeing the Harness Shop in the context of "Bar and Stable..." maybe its legit. I could see that fancy overhang on the right side of the picture being a hotel/tavern. My prior dismissal of a street light in an obscure back water of town is probably not valid. I've found evidence of them being installed pretty early in more isolated spots. The long, wide straight road. Does it have a parallel on this 1874 illustration?
This image by the way is just about the only reliable plan of French Town. There are three buildings big enough to be the Rosseau House. I thought I had another one identified as a second known early tavern, but as it turns out, I was wrong...........
Peter Rosseau died in 1871. Despite being one of the first settlers of our community he seems to have passed with little notice. To be fair, newspapers of this time period are intermittently available and not very good. I'm sure for his wake there was a serious bash at the Rosseau House. Perhaps the apparent management changes in 1869 reflected poor health?
At about the same time another man comes onto the saloon scene in French Town. And despite turning up a generation later and only tending bar for a short while, we know a lot about Valentine Blum. And no, you can't see his establishment on the 1874 view.
Valentine, or sometimes Valentin, Blum was born in Germany in 1844. He moved to Wisconsin in 1860 and to Eau Claire in 1864. His main work then became....river pilot! He was the guy who steered big rafts of logs down the Chippewa River. And evidently he was good at it.
In 1870 the census lists him as working at the mill in French Town. And, starting in the spring of 1870, also running an establishment in French Town that combined saloon, restaurant, bowling alley and "lager beer fountain"!
Sounds like a fun place. I'd go there. But it does not appear to have been a success. It seems to have gone out of business in 1871. In October of that year the owner, the fascinating E.R. Hantzsch, was advertising for a new tenant as the place had been "unoccupied for some time". A month later it burned down. These things happened often in places built out of and heated by, wood. Maybe more often if there was insurance money involved. Just sayin'.
After his year or so running a sort of 19th century entertainment center Blum went back to working in the saw mill. 1873 finds him sounding rather respectable, he was an election official in Eau Claire where he presumably lived. But then there's that other matter. Also in 1873 a batch of rowdy lumberjacks turned up in Chippewa Falls and "..got upon a right lively bender...". The police who were sent in to quiet them down were met with fists, thrown objects and abuse. They retreated for a time and things really got out of hand. And it is reported that: "Valentine Blum, a resident of this place but now running the French Town mill was shot through the neck." It was pointed out that he was "...taking no part in the affray", making him sound like an innocent bystander.
He survived, and on his death in 1896 was considered a highly respected Old Pioneer.
-----------------------------------------
Not sure when I'll have time to take on the Taverns of Old Chippewa Falls (other side of the river), but it might be a few weeks. Busy times and a complicated subject.















.jpg)


















