So I had a birthday recently. One of my grandkids drew this picture:
That's me on the left. Boy, that's spot on. And the squiggly, untidy object on the right? I'm told that is a robot. Will it turn out to be equally accurate?
If you were so inclined there are lots of things on the internet you could look at to see how other FIRST robotics teams are doing. I try not to do so. The teams that put stuff out there are the best organized, funded, supported ones. Everyone who is struggling or doing sort of OK but has no energy available for more than finishing the darn robot is not putting up videos and glowing reports. So you get discouraged and right quick if you pay attention to such material.
Monday robot posts essentially reflect just what we got done on Saturday. It is a longer session and one where the kids show up rested.
We now have all the parts we expect to need, and can throw them onto the scale. That goal of staying under 120 is important. There are plenty of unknowns and our allowance for extra structural strengthening elements is probably light, but this pile is most of what goes into the final machine.
The weight tote board for 22 January shows 77 pounds. That is so good I'm going to want to double check with another scale. Keep in mind that we have to lift this beast with pneumatics.
Presently it exists in various subsystems. The intake system is dismantled at the moment. In testing we reprised a trick from earlier robots. This little figure 8 of surgical tubing radically improves the grabbing ability of the rollers and makes minor issues like ball under inflation less of a problem.
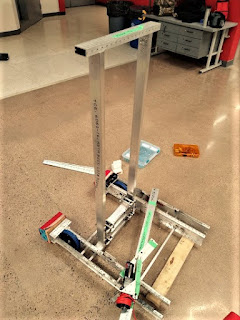
An elevator is not exactly the ideal solution for this problem. It is a system that made properly can lift a whole lot more than the giant tennis ball it has to handle in our design. But we had the kit, we had limited time, and it is a very good learning experience. There are some tight tolerances here and essentially the whole thing had to be built, dismantled and built again. It now works pretty well, but we have improvements in mind for it.
We have had the drive base together for about a week. Today was the first time software had the controls all active. They are also teaching it to "hunt" those tennis balls in autonomous mode. This is pretty important, the last robot we built had such a touchy drive system that practice opportunities were limited. Now we drive every session.
The drive base is one half of the robot. The other half, the manipulators, are being assembled on what we call "the skeleton", a bare partial drive frame of the same dimensions. It lets software, drivers in training and the mechanical team all more or less have something to work on with minimal interruption. Green taped parts are, we hope, final components. In a week or so we will begin to unite the yin and yang of this robot, but we have numerous mechanical systems to tweak and more structure to add on in the week ahead. Oh, and one important mechanism that is in the "we'll figure something out" category.So at the moment we are doing "OK". At worst - thinking epidemic + blizzard scenario - we should have something that can pick up a ball, do the lower end game "monkey bar" and not fall apart. In previous seasons we've been in better shape with about a month to go. We've been in worse shape too.
_______
* title post is a tip of the hat to Alexander Pope. Not sure where that came from.






No comments:
Post a Comment
I'll be putting comments into "moderator" format for a while. Sometimes they get a bit off topic. I'll post almost all of them even the One Weird Trick Spamsters if they amuse me. I also answer my email at dagmarsuarez@gmail.com